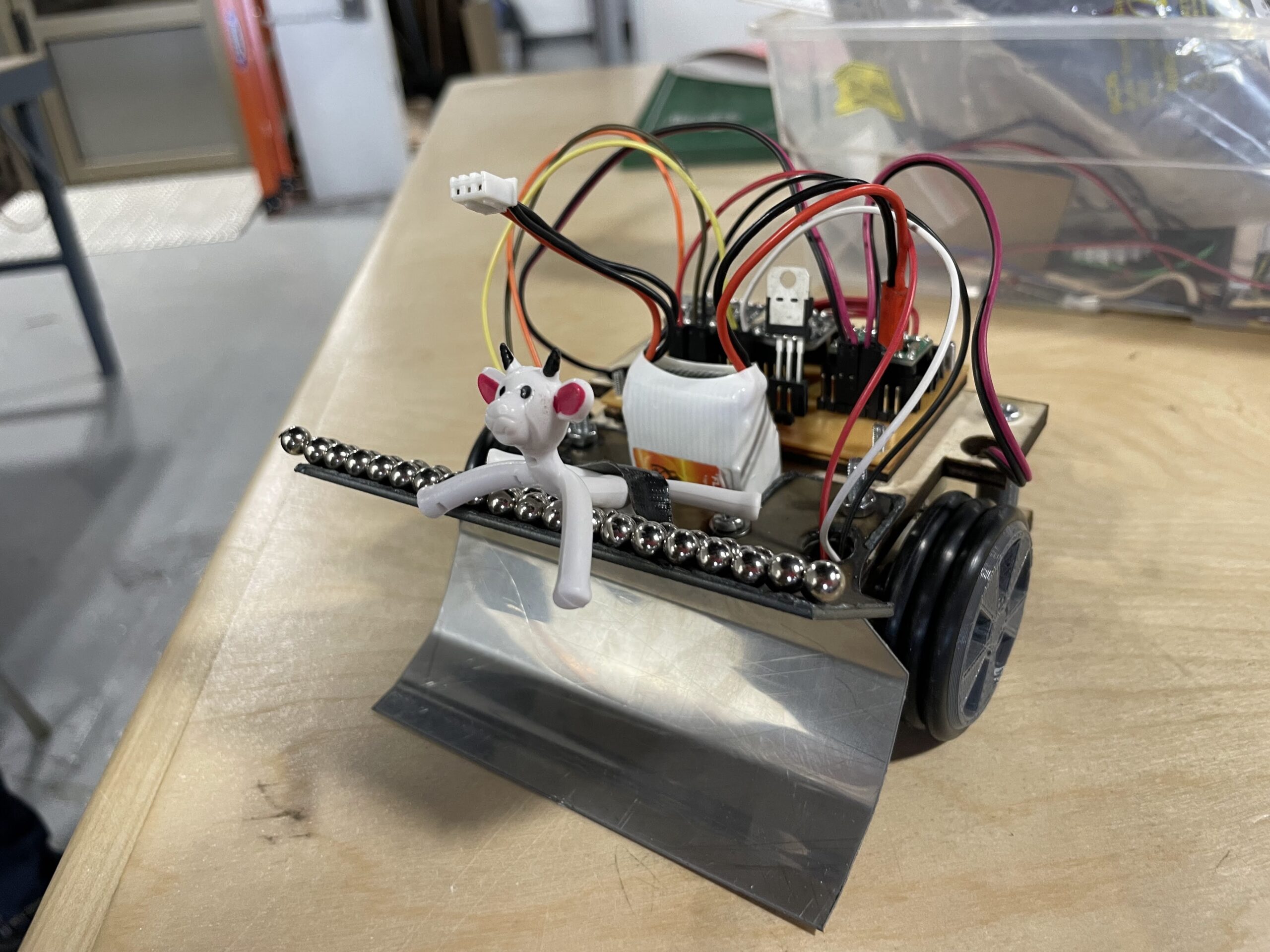
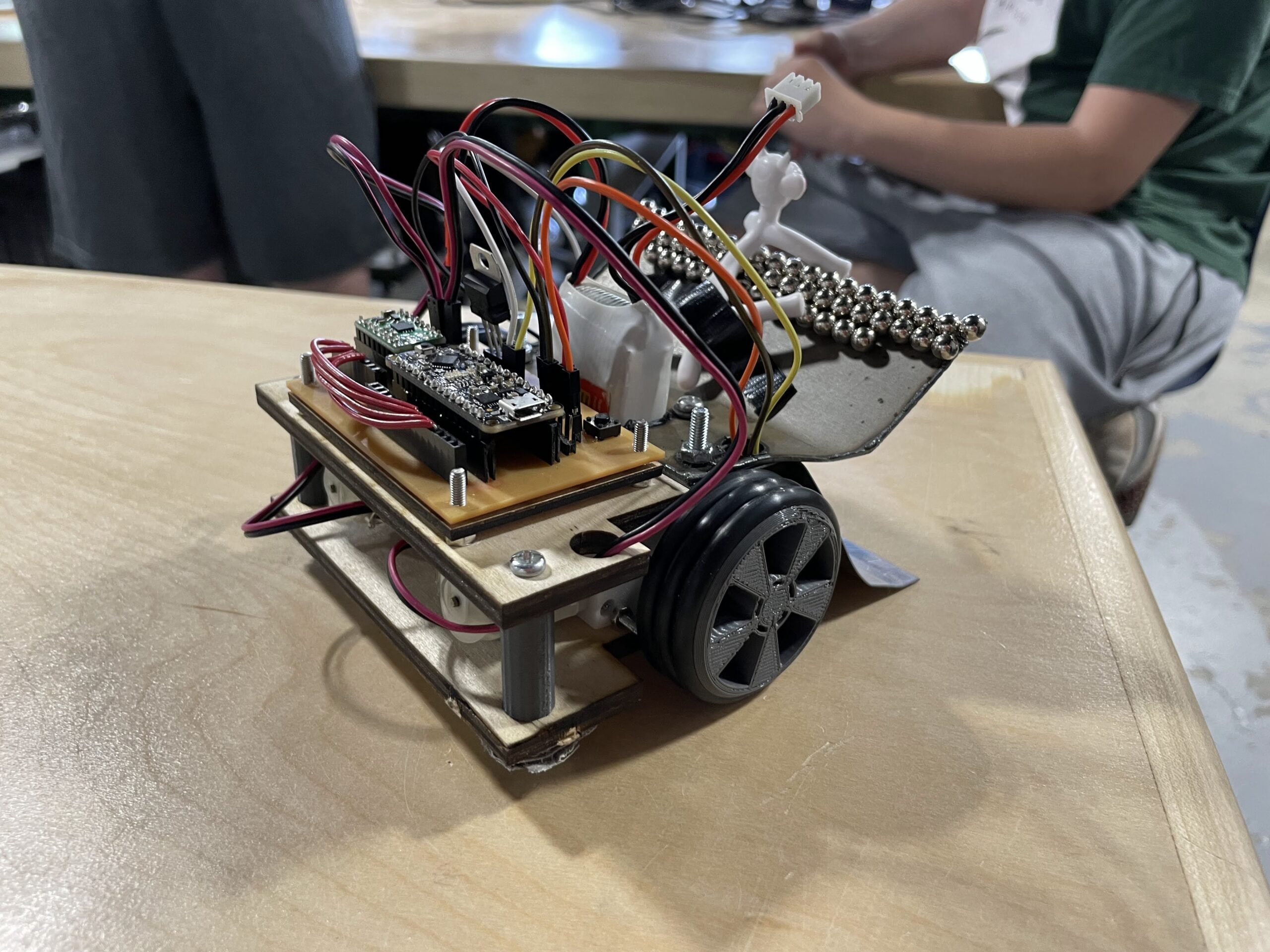
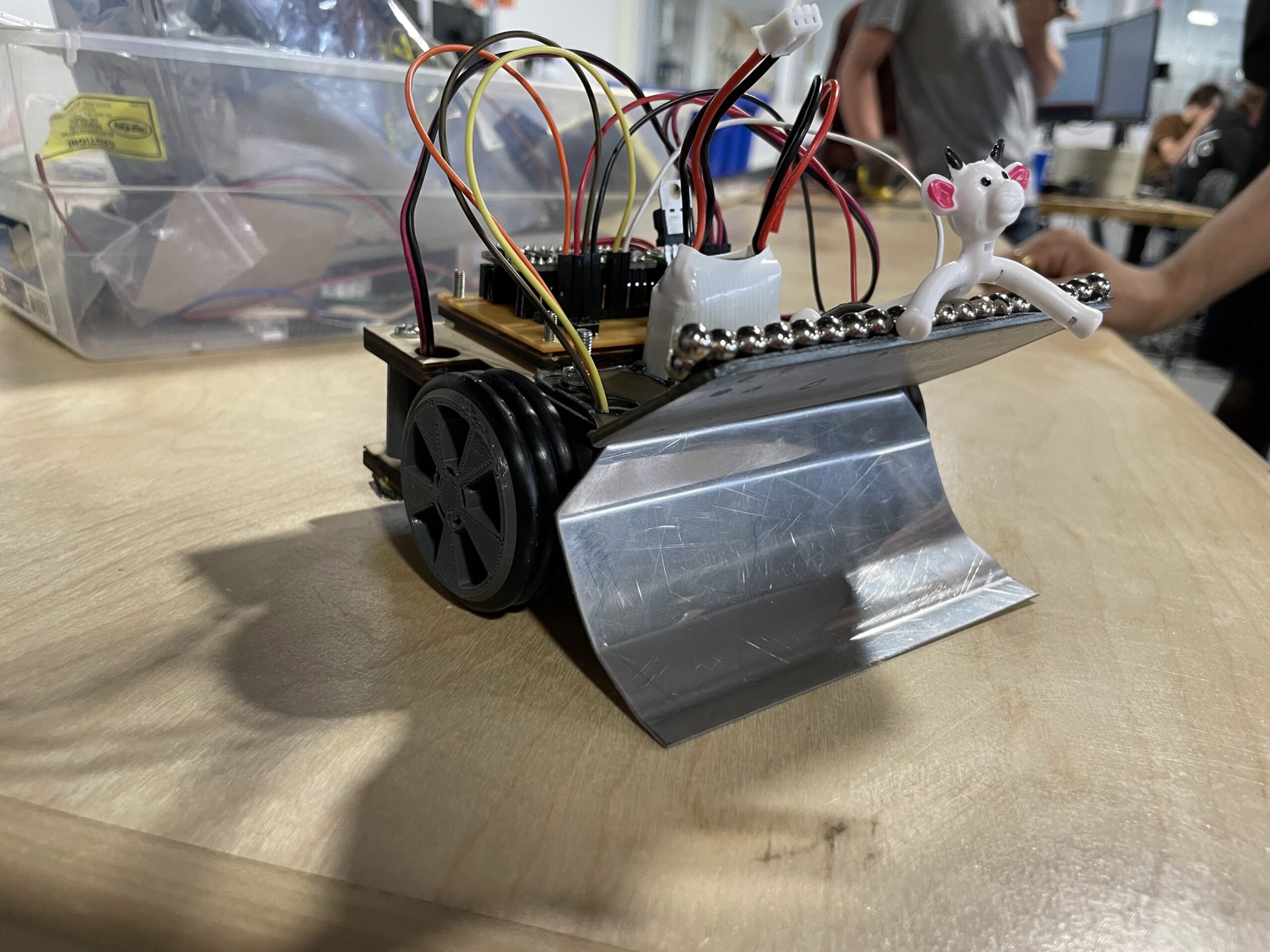
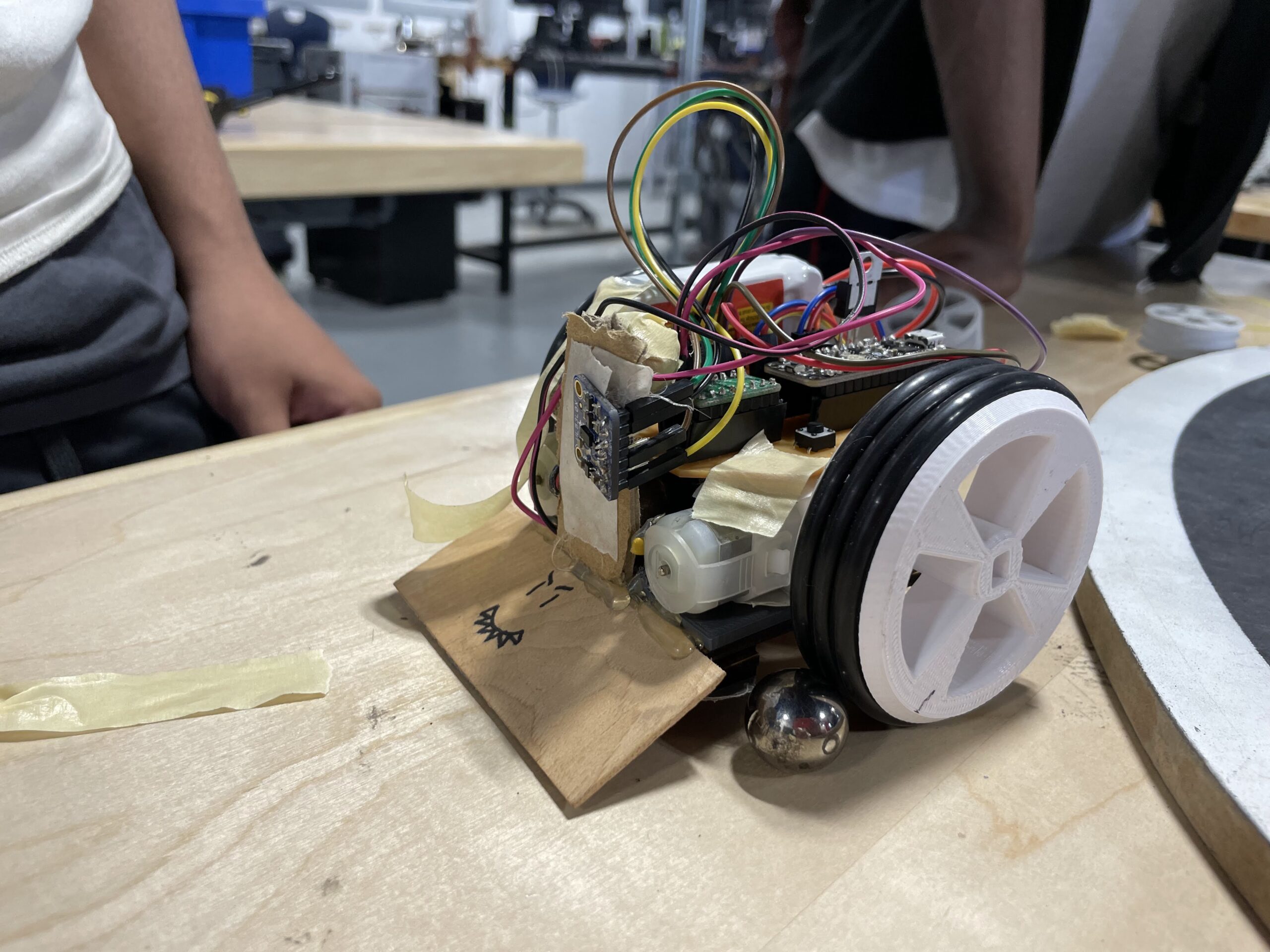
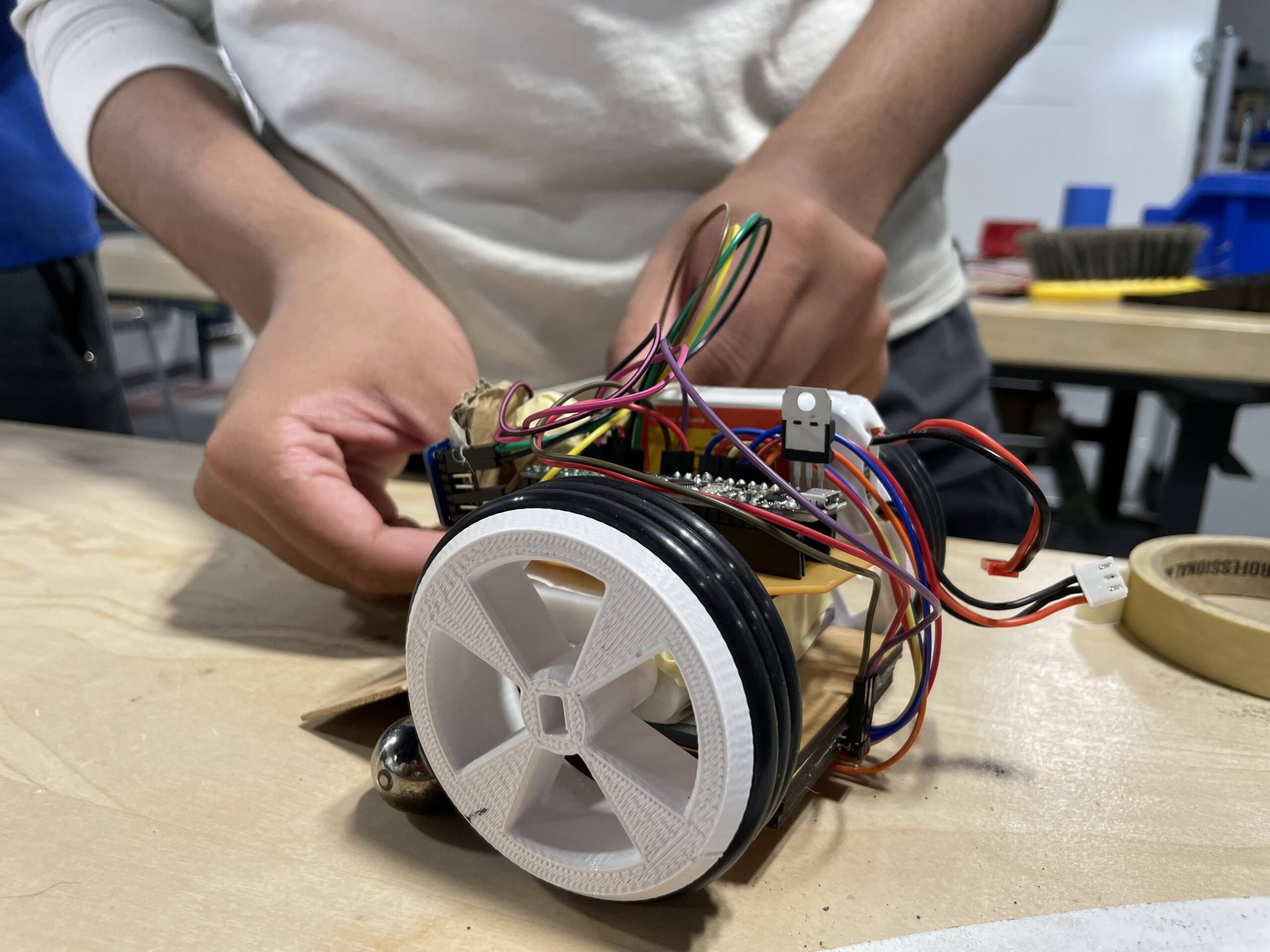
Today the Sumobots finally did some battle against each other. There were several entries from our student teams, which included names such as Bozo Bot, Mama Tipson, Connoli, Open-Faced Sandwich, Reverse Sandwich, and Kendo(Revived). Many of the bots were not as fully developed as the students wanted, but they are learning the difficulties of creating a fully autonomous robot from scratch. My favorite bot had to be Kendo(Revived) which is far and away the most advanced bot of the group. It features a plasma and waterjet steel scraper and jaw to remove combatants from its path, and is build on a solid foundation with triple traction wheels and custom circuit board. Additionally, the students were adding small magnets to get the bot to the heaviest allowable weight for combat. We had a lot of fun watching the robots today, and will probably have another day of bouts in the next few weeks, which will allow students to update their robots and make them better.